


轮足机器人这类结合了轮子和腿优点,独特且创新的机器人,正引起研究人员以及企业开发者慢慢的变大的兴趣。这些机器人通常配有轮子,又可在需要时转换为腿,从而在各种各样的环境中提供更大的移动性和多功能性。
在过去十多年里,由于轮足机器人的构型较新,研发在全球都处于早期阶段,全世界创新者在考虑轮足这类新型机器人时,往往需要仔细考虑多个重要的因素。例如轮子和腿设计问题,又例如关节输出扭矩和能量源的问题,还有例如二次开发、成本等问题,这样一些问题没太多可供参考的对象,相关研究进展也非常缓慢。但近年来计算机视觉、强化学习和运动控制领域的最新成果很大程度上扩展了机器人的性能,使得慢慢的变多企业加入了轮足机器人这种新品类的探索。
从全球市场来看,轮足机器人赛道的前沿研究者和创新者有瑞士ANYbotics、Ascento、GRASP实验室、CMU机器人研究所、苏黎世联邦理工学院等为主,而国内例如本末科技、腾讯、宇树、逐际动力等科技厂商也在最近几年开始跟进并快速超越。
虽然这些已发布的轮足机器人产品,离我们心中期望的理想状态还有非常长一段距离,但毫无疑问,该赛道的热度正在快速上升。
机器人的轮足式运动概念源于人们希望创造能够在复杂和非结构化环境中导航的多模态理念,类似于部分多足虫类在各种地形中移动的方式。多模式轮足机器人的概念结合了轮式和腿式运动能力,代表了机器人领域相对较新的发展趋势,它的发展本质上是为满足对能适应各种环境的机器人的需求。
多模态机器人概念的具体起源其实距今并没有多少年,与机器人结合的研究是2000 年代左右开始兴起,最初是欧美的部分机器人竞赛中,提出希望有一种多模态的机器人,应对场景探索、检查、搜索和救援等机器人操作环境日益复杂的各种应用。
很快研究人员和工程师认识到,没有一种单一的运动模式(轮子或腿)适合所有情况。但人们在研究中对能够穿越不同地形并处理各种任务的机器人的渴望,反倒导致了多模态机器人的发展。研究者发现,轮式运动在光滑的表面上非常有效,而腿式运动在崎岖或不平坦的地形上提供更好的机动性。因此,他们开始探索如何结合这些模式来创造更多功能的机器人,能利用两者优势的多模态机器人由此快速发展。

2009年由苏黎世联邦理工学院(瑞士联邦理工学院)相关研究人员成立的ANYbotics公司,也在2016年对其ANYmal进行轮足迭代,重点增强了其移动性、感知性和自主性,同时该机器人配备了各种传感器,包括摄像头和激光雷达,用于导航并与周围环境交互,标志着这一方向真正取得了实际落地成效,后续波士顿动力也尝试了开发轮足机器人以便快速商业化,近日也有Fraunhofer IML研发的evoBOT火爆全网。
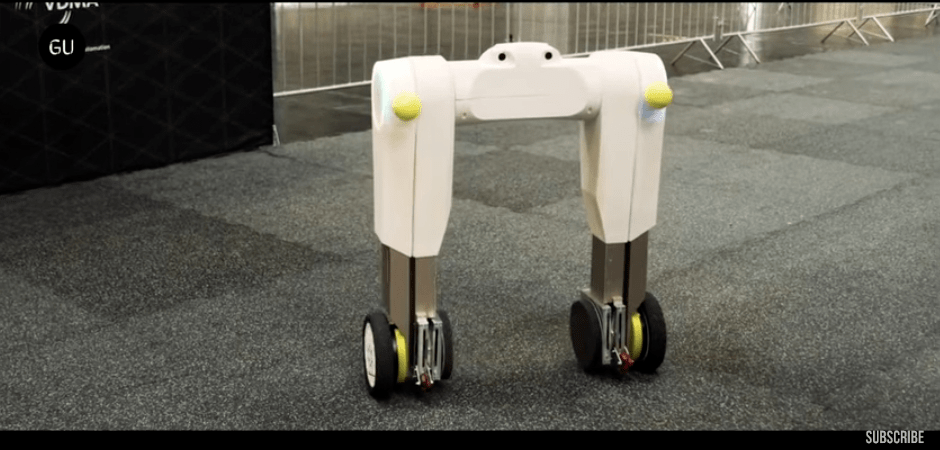
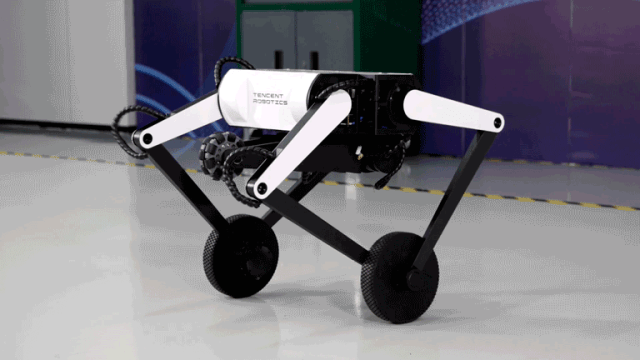
国内的轮足机器人在近年来也取得了较大进展,腾讯Robot X实验室、宇树、本末科技是该领域研发和落地的代表,目前也在全球位于第一梯队。他们的研究开始结合了轮式和腿式运动能力,代表了机器人领域相对较新的发展。
轮足机器人的研究不仅仅是在实验室中,产业化也开始跑出了加速度,国外的创业团队就也在近年来不断得到了资本加持。
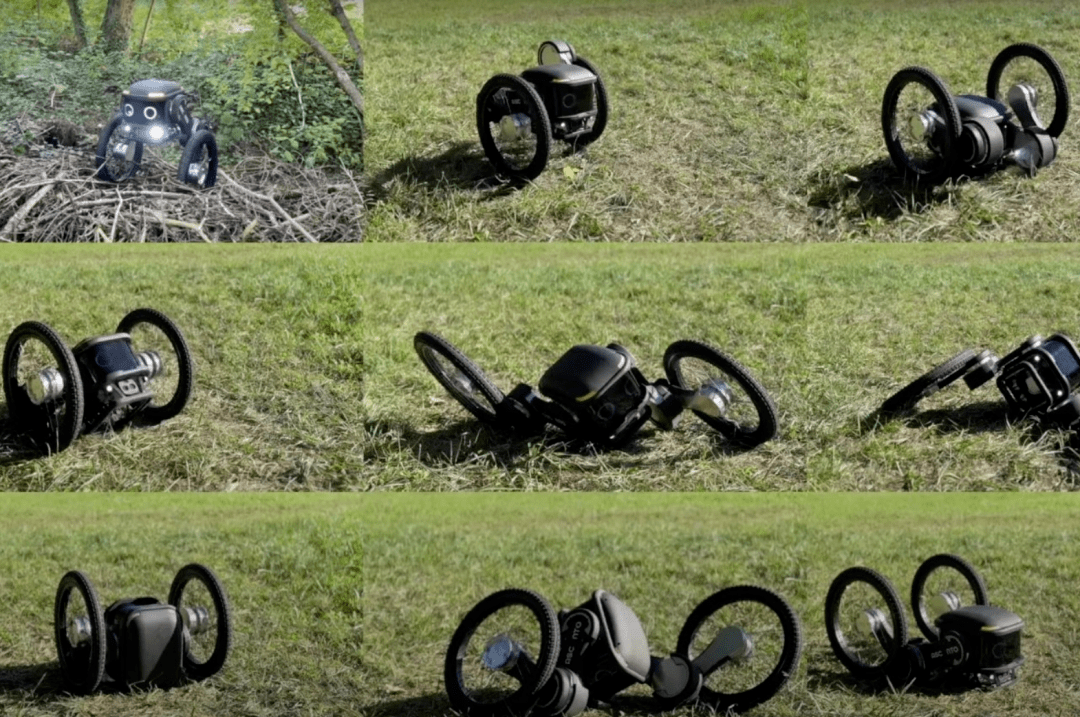
例如近期,国外机器人初创公司Ascento 就宣布完成430万美元融资,并推出最新的自主户外安全巡逻机器人:Ascento Guard。目前其拥有10多名员工,并正在招聘其销售和运营团队,以进一步扩大规模并提高市占率。
据机器人大讲堂了解,在2018年 Ascento其实只是苏黎世联邦理工学院的一个实验室项目,首席执行官 Alessandro Morra和首席技术官Miguel de la Iglesia Valls原先都是苏黎世联邦理工学院学生,后引入了具有安保软硬件开发经验的两名创始人Ciro Salzmann 和 Dominik Mannhart,并因为轮足产品的独特性以及安保行业经验得到了知名投资者以及国家资本的关注。
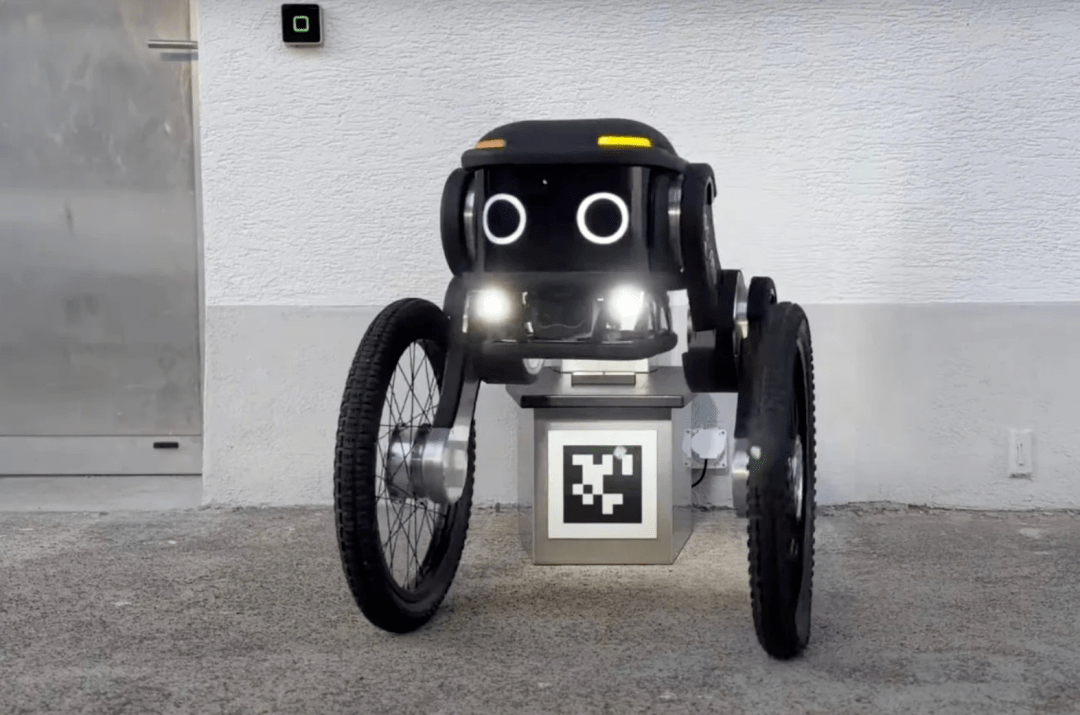
Ascento在产品外观和结构设计上不断优化,其于 2022 年推出的机器人产品视频曾在网上疯传,观看次数超过百万次。前不久这家初创公司推出了最新的自主户外安全巡逻机器人 Ascento Guard,这款机器人又因为卡通风格受到了许多人的围观和欢迎。
最为显著的特点是该机器人主体底盘有一对会闪烁的圆形大“眼睛”,以及充当眉毛的矩形橙色警示灯。在需要快速移动时,Ascento Guard的眼睛会“闭上”以模仿睡眠状态,但在执行巡逻任务时会睁开眼睛。
有媒体认为,机器人保安虽然现在已经不是什么新鲜事,但 Ascento Guard明显拟人化的设计使其有更好的亲和力,这无疑是一种消除公众潜在怀疑的新方法,也能有效减少专家谈及太多自动化产品所造成的劳动力和隐私问题,还有潜力用于老年人护理和医疗援助。
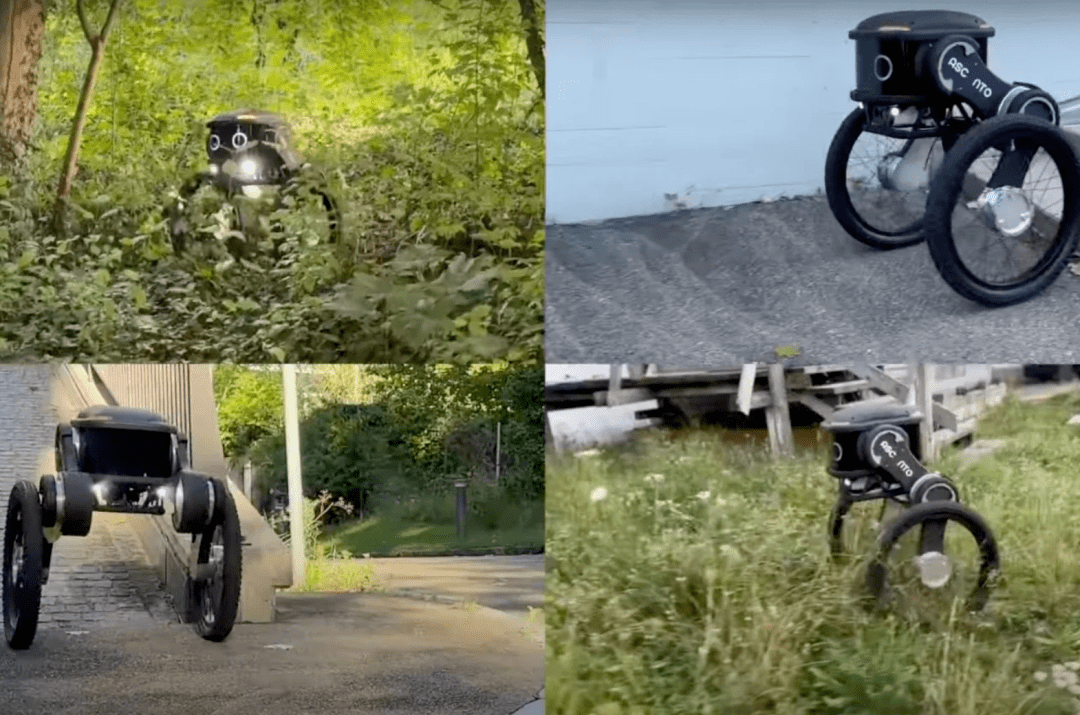
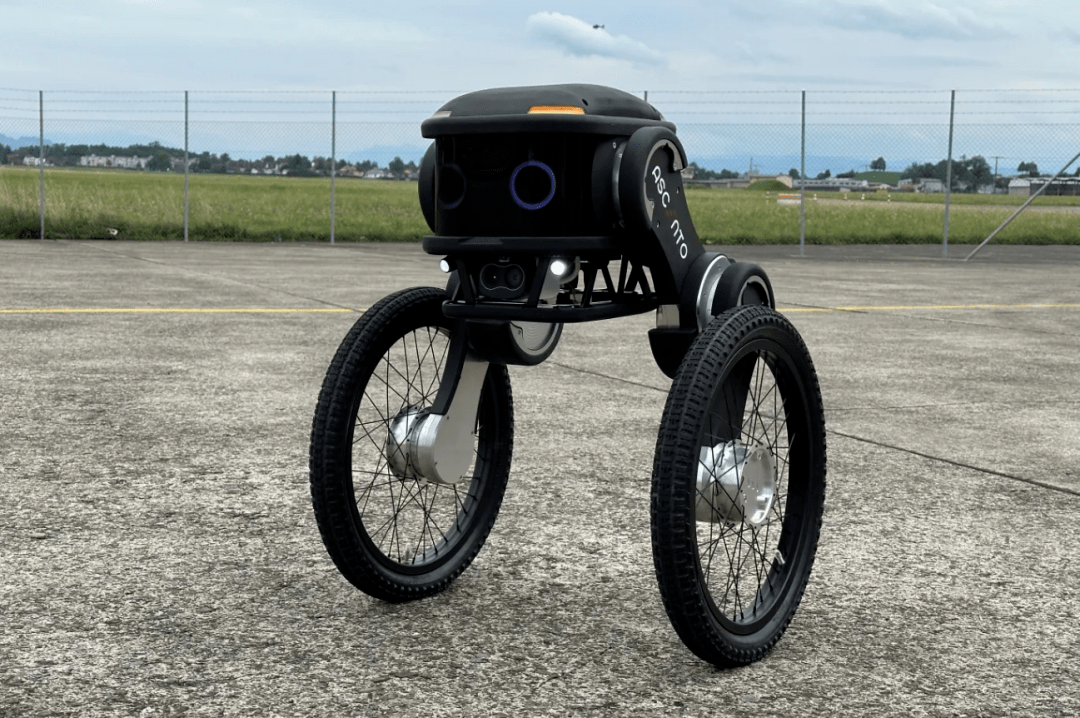
在具体功能上Ascento Guard没有太多,其依然配备了热成像仪和红外摄像机、扬声器、麦克风以及 GPS 。值得一提的是,Ascento Guard采取了双向设计,这保证了机器人不仅能够全地形多向移动,在窄通道的机动性上也大幅提升。同时机器人还能从任何位置跌倒恢复并保持 5 公里/小时最高速度移动。利用这些功能,Ascento Guard 可以快速完成巡检等工作,及时发现侵入者、监控停车场并记录车辆情况,它还可以识别洪水和火灾,以及检查门窗是否关闭。
该公司计划通过机器人即服务(RaaS)的商业模式为客户提供解决方案。自 2023 年初以来,Ascento车队里程以超过 70%的速度逐月增长,并在该领域已累计运行超过 3000 公里(1800 英里)。目前,在美国与Ascento类似的公司还有Cobalt 和 Knightscope。
国内轮足机器人第一梯队的企业本末科技,也找到了一条适合的发展道路,其推出的双轮足机器人刑天和TITA灵巧炫酷,在开发性和成本等方面也遥遥领先于国际同行,目前正在积极探索商业和工业多个领域的可能性。本末科技近日也完成数千万元A+轮融资,并于近期并购了“杭州铁美众联科技有限公司”,本末科技的A+轮融资由立湾资本领投,建元投资跟投,资金将主要用于研发投入、产线扩建和市场推广等。
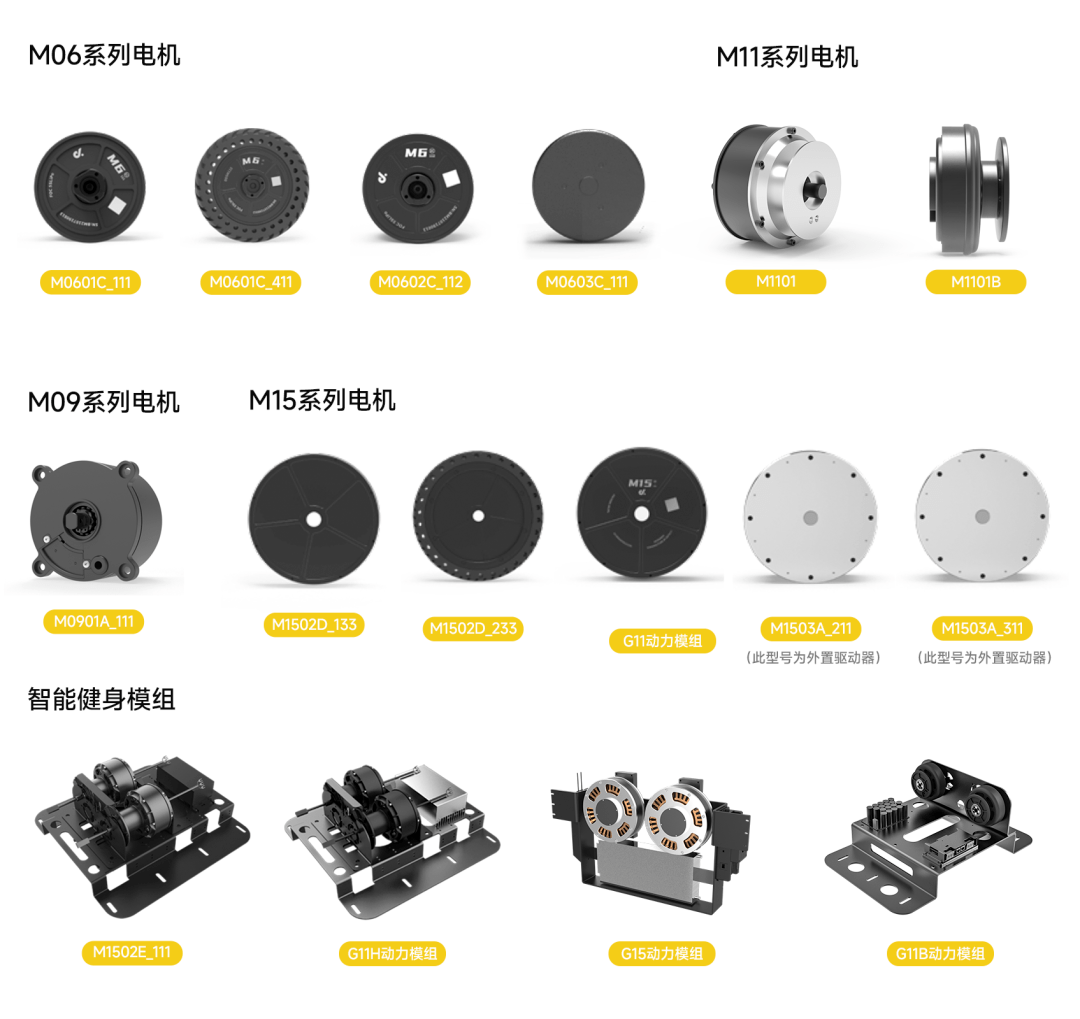
本末科技抓住的产品创新与变革核心是自研自产的机器人关节驱动部件。例如本末科技的刑天机器人,全身就由6个可以自由运动的M1502D直驱型机器人关节驱动,不仅能做到动力澎湃、动作丝滑、节电高效,而且与传统的减速器方案不同,刑天运行过程中极致安静,不会带来任何噪音困扰,独特的变形功能更是让机器人兼顾足式机器人的灵巧与轮式机器人的稳健迅捷。

直驱型机器人关节驱动与传统的减速机驱动结构不同,直驱技术主要是将电机与被驱动工件直接连接,省略了减速机、丝杆等能量损耗较大的中间传统环节,从而减少了动力损耗,更为紧密的一体化结构也节省了后期的产品维护成本。目前,包括特斯拉在内的许多人形机器人企业,也采取了类似电机和驱动一体化设计方案。
由于结构上没有减速机的齿轮磨损,并且能够有效减少齿轮之间摩擦所产生的热量,直驱电机的使用寿命非常长,可达传动电机的10倍之久,还可以做到极致静音,同时能维持比较高的控制精度,帮助企业节省产品内部近一半的空间,更有利于内部硬件集成,增加续航和接口数量,实现较为合理的机载处理能力和数据存储能力。
经过多年的研发积累,目前本末科技拥有M6、M7、M9、M11和M15等系列电机产品,凭借出色的产品性能,已成功切入家用机器人、工/商用领域机器人、智能健身器材等领域。
据机器人大讲堂了解,本末科技还已和多家头部上市企业达成合作,为其提供从需求定制、方案设计、测试维护的全套解决方案,这也为本末科技的未来发展提供了更广阔的市场空间。未来,本末科技也将持续横向拓展行业应用,提升力矩密度比和降低成本以进一步提高直驱技术商业化水平。
本末科技通过长期在轮足机器人领域的技术积累,已填补国内该领域的研究和产业化空白,目前正对标国际市场,本末科技后发先至,率先完成批量化生产和市场商业化验证,成为中国轮足机器人产品在国际上一张闪亮的名片。
由于轮足本质上是一种混合模态,目前轮子大多时候会安装在折叠腿上,其运动研究需要结合不同的运动模式,因此还仍然存在多个核心难题。轮腿设计的最终目的是让机器人能够使用尽可能简单的硬件并节省电池,到达人们可以到达的任何地方,大多时候机器人还需要在楼梯和不平坦的地形上行走。
例如能否在轮子和腿之间无缝过渡决定了机器人的稳定性以及环境适应性。这使得轮子和支腿必须采取精心的结构设计,不仅要考虑车轮尺寸、腿部关节以及车轮和腿部之间的过渡机构等因素,还要在设计上考虑如何实现两种模式下获得最佳移动性能,尤其两者硬件的组合以及软件控制算法、运动规划技术,对于实际穿越不同地形的能力或应用至关重要。
还有例如混合运动下的能源和输出扭矩问题,决定了机器人的续航能力和运动性。选择适当的电源、关节部件,并估计机器人在轮式和腿式模式下的功率需求,考虑模式之间转换的能源效率,能够更好帮助确定轮足机器人的具体用途,综合评估不同地形类型的影响,从而才使得机器人能够处理各种各样的环境,从光滑表面快速过渡到崎岖或不平坦的地形。
除此之外,还有安全性、成本、耐用性、可维护性等多方面的难题。设计机器人时不仅要考虑到材料、磨损以及定期保养或维修的需要,以实现耐用性和易于维护,还要考虑成本效益和预留出常见的包括视觉、激光雷达等传感器的集成接口、空间,这使得国内外相关研究和产业化的进展一直并不算特别迅速。
同时,轮足机器人目前在法规和标准方面也仍不成熟,在公共场所或商业环境中运行可能还存在部分风险。但作为一种全球领先的前沿性产品,其发展的潜在能力已经在近10年时间得到了学术界和产业界十分普遍的认可。
事实证明,世界上许多业务无法仅靠软件解决,就产业化潜力而言,轮足机器人作为机器人研究和开发的前沿领域,其功能使其适用于广泛的应用,包括搜索救援、勘探和军事行动等都展现出较强需求。
例如多家企业探索的安防行业,Gitnux 的数据表明,在全世界内,行业人员数量还不到其所需的一半,人员招聘是一个长期存在的问题,员工流失率极高。未来十年开发机器人技术的公司会拥有巨大的机会。
目前,已经有全球许多研究机构和企业都在尝试设计和构建更合乎行业需求的轮足机器人,并快速提高性能和可靠性,以有效且高效地实现其预期目标。未来该领域还会有哪些新的创新出现,我们不妨拭目以待。返回搜狐,查看更加多
